Brief Summary: Tacto is a glove with embedded hardware to bring in touch into virtual reality. To view its promotional video please click here.
For: Master Thesis, UC Berkeley. Research at UC Berkeley BEST Lab with Professor Alice Agogino and Euiyoung Kim, PhD
Team: Arielle Maxner, Diego Rivas, Kingston Xu
My contributions: Hardware architecture design and roadmap, medium-fidelity prototyping and programming, collaboration with research on object haptic profile development.

Brief Summary:
The Virtual Reality experience is limited by its unintuitive control and ineffectiveness in targeting senses besides sight. Haptic feedback can solve these issues by intuitively providing more information to the user, allowing them to explore virtual worlds in a completely new level of immersion.
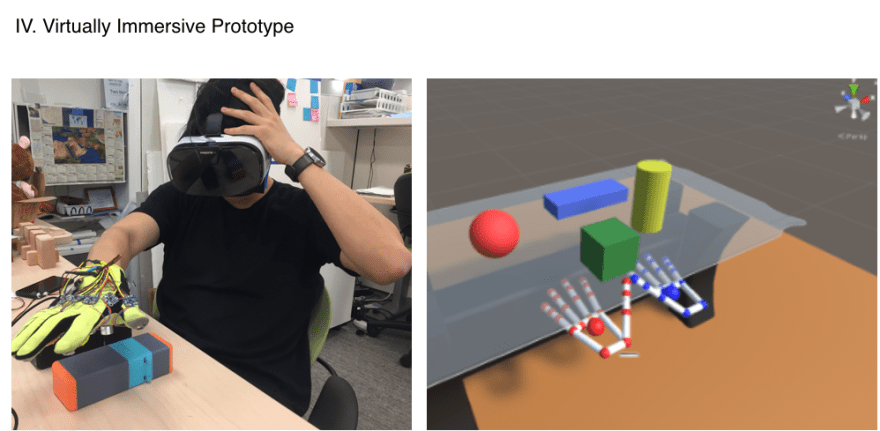
Our project, in collaboration with Samsung, originated from creating a wearable leveraging emerging flexible electronic technologies to somehow enhance the Virtual Reality experience. After extensive design research, the idea that we decided to develop is a glove with an array of sensors and actuators to haptic feedback for VR users to feel virtual objects and boundaries.
Our current stage is technological research and prototyping to understand the capabilities of haptic actuators to develop artificial perception of texture and to generate a human-computer interaction “haptic language.” We aim to allow users to cognitively understand when they are touching a virtual object or surface. Based on our design and technological roadmap, we predict that this type of technology will be one of the future breakthroughs that will revolutionize the way people immerse in virtual environments.
——————
Design Research Overview
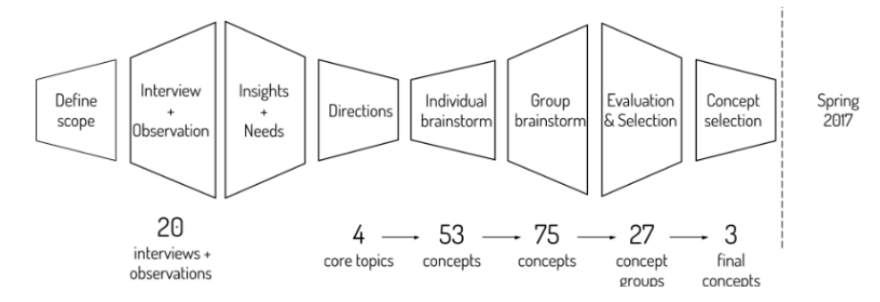
Our team collaboratively came up with three final concepts after undergoing a semester-long design research process. These concepts were:
-An AR device to aid in learning daily tasks
-A haptic hand wearable to bring in touch into AR/VR
-A cloth with soft robotics to capture geometries and bring them into virtual space
After iterating in our design process and getting feedback from industry experts, our team chose to pursue a glove to bring in touch into virtual reality, named Tacto.
Needs Addressed
I. Immersion is limited to visual input
II. Control in VR needs to be more natural and intuitive
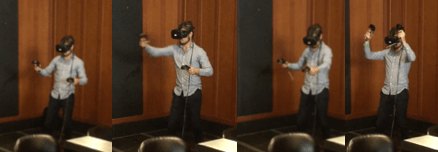
Sample observation of a user showing unnatural motion driven by VR controls
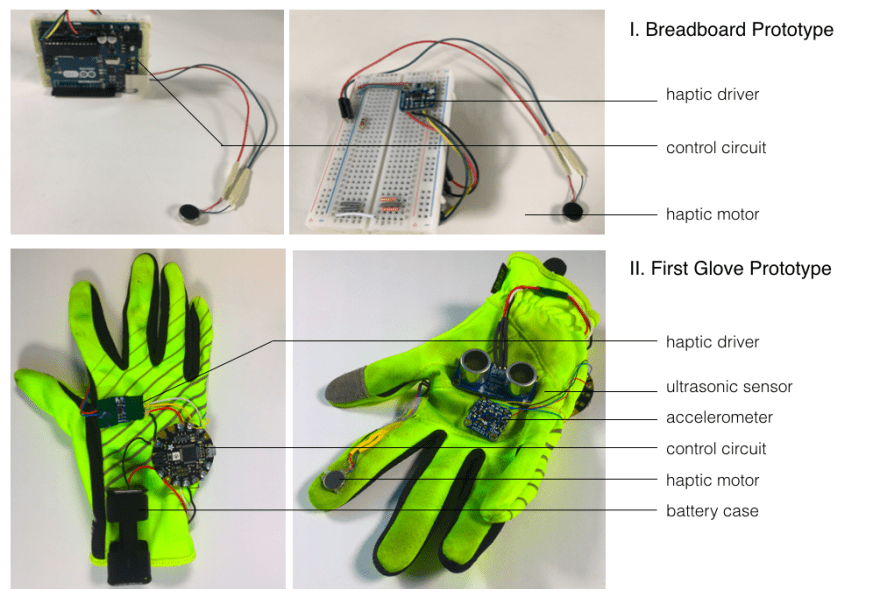
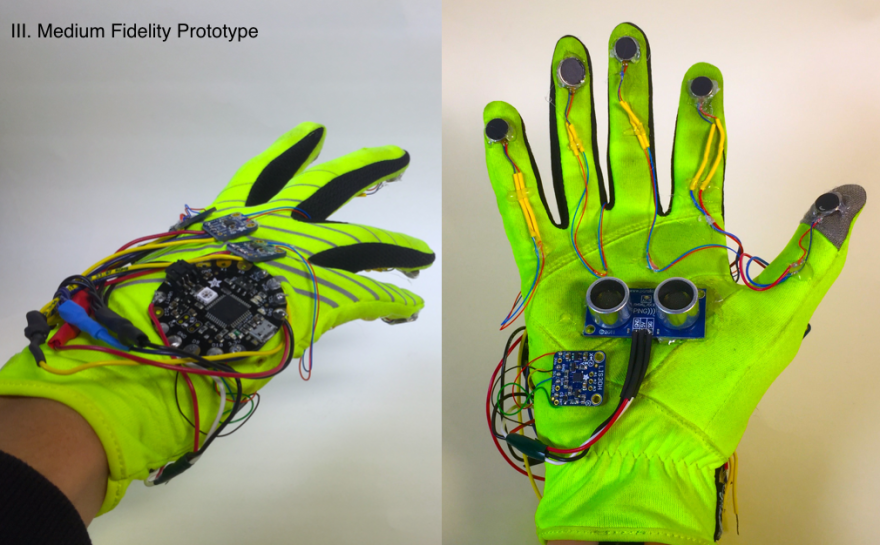
Prototype Progression
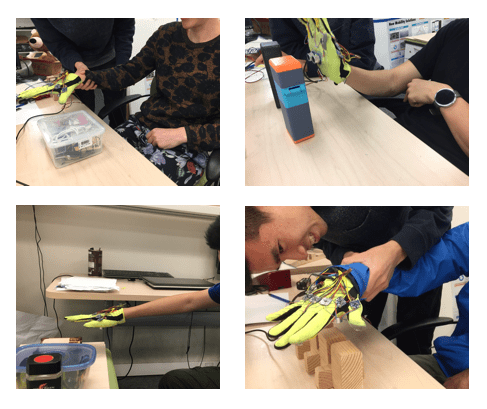
Cognitive User Testing
Part of our development process included understanding how the human brain works, and the power of touch with and without visuals. For this, we conducted several tests with real objects to see if users could grasp edges, shapes, as well as size driven only by haptic feedback.
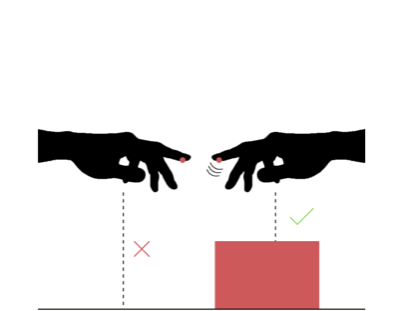
From our testing, we got three main pieces of feedback:
- The effect has to be gradual – the more you push into a surface the greater the amplitude of the haptics.
- The effect has to be localized – specific to the part of the hand that is in touch with a virtual surface
- The visuals cause the user to shape the hand and predict to a certain extent what they will feel – so, visuals are extremely important in enhancing haptics as well.
Technology Fit Analysis
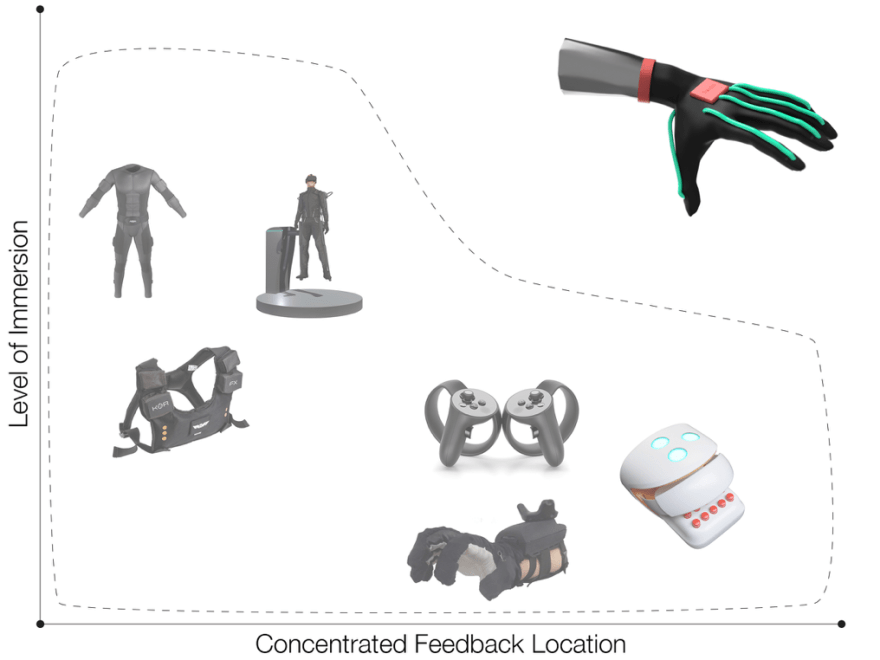
Complementary devices have had stagnant growth in the Virtual Reality market, as it is shown in our roadmap below. Most of the development has focused on the environment and the headsets. However, these complementary devices are critical to address an unmet need gap shown in red in our design roadmap.
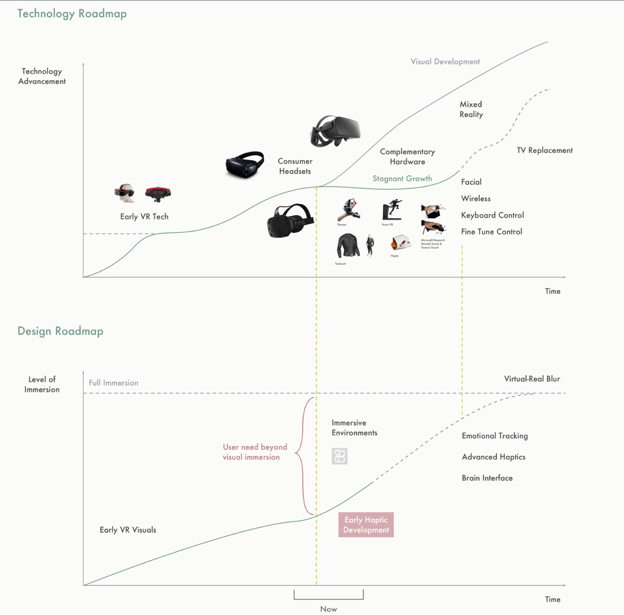
While there are currently many initiatives to bring in haptics into VR, they are lacking one of two things. Some are fully immersive experience hardware (such as body suits), but aim at a much higher price point and do not tackle the need for intuitive control. While others, providing more concentrated feedback, give a less immersive and real experience than our product aims to provide. Most of these hand held devices give very monotonous haptic feedback, while we working iteratively on our software to bring in the closest to real tactile feedback as possible.
Future Work
Our next step is in collaboration with other research done at the BEST Lab, which explores tactile patterns in holding real shapes. Our plan will be to incorporate “haptic profiles” into objects of Virtual Reality. That is : we are using algorithms to map out where in the hand you have tactile feedback in holding different geometries. We can then transfer these maps into our haptic grid. An example of the haptic actuators that would be triggered when holding a virtual cylinder is shown from the map comparison below.


